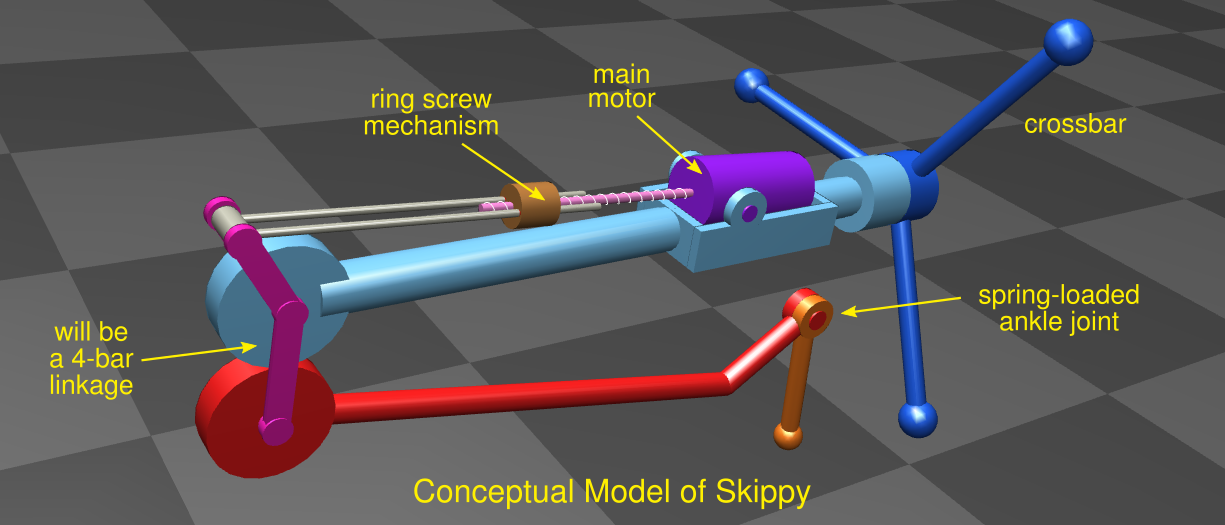
The Skippy project aimed to design, build and demonstrate a highly athletic, yet very simple 3D hopping and balancing robot called Skippy. The picture above shows the basic idea: a leg driven by a powerful actuator so that the robot can hop high, and a three-arm crossbar that allows it to balance and steer in 3D. Our original aim was a target mass of 2kg and a target hopping height of 4m. However, as we learned more about the problem it became clear that this was not going to work; so we tried instead for 3kg and 3m. Our first prototype turned out to weigh 5.3kg, which is too heavy to make high hops. Nevertheless, even this machine can balance, make small hops, and survive falls and crash landings without damage. (You can see lots of crashes in this video.) It is fully autonomous, and operates without any umbilical, harness, safety net, external sensors or remote brain.
The objective was to explore the limits of what is physically possible with today's technology by means of a robot that is simple, robust and fairly cheap. Skippy has only two actuated degrees of freedom, yet it is (theoretically) capable of a large repertoire of behaviours, such as: single hops and continuous hopping; hopping in place and travelling; making sharp changes in speed and direction; somersaulting; tumbling; balancing while making other movements; turning on the spot; moving in time to music; and making carefully aimed hops to land accurately on a target spot. We managed to demonstrate many of these activities in simulation, and a few also in reality.
Whereas other high-performance robots tend to be bio-inspired, the Skippy project was always about trying to close the gap between the high performance available from off-the-shelf components (batteries, motors, etc.) and the poor performance of legged robots at the time when the Skippy project was conceived. (Today's legged robots are quickly getting better.) So Skippy is really a technology-inspired robot, rather than bio-inspired. Although Skippy was intended to be a leader in robotic leaping and balancing, the real leader nowadays is Salto-1P. (See also the Skippy team's contribution to Salto's performance.)
The Skippy project began at the Australian National University, and then moved to the Italian Institute of Technology. To learn more about the Skippy project, read the other pages on this website and/or watch this (now slightly out-of-date) 2020 movie.