This page collects together some of the videos and animations we have
made. Some animations are available both as a video for you to play
directly and as a Matlab .mat file that you can play using the
function showmotion
in Spatial v2, which will give
you a better viewing experience. To download the .mat
file, click where you see the icon SV2.
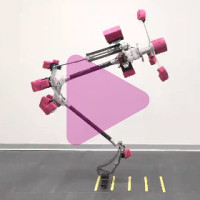
Skippy Hops Higher with a Ring Screw (Aug 2024)
This video compares Skippy's hopping height when fitted with
a ring screw versus a ball screw in the
drive train. Not surprisingly, it hops higher with the ring screw
thanks to its higher maximum speed. In this experiment Skippy achieves
a 34cm hop, measured as the rise of the centre of mass from lift-off to
apex. The novelty here is that this is the first time a ring screw has
been used in a robotic device. For more details see
publication 35.
Skippy Balancing, Hopping and Falling Over (Oct 2023)
This video, prepared by Antony and Federico, shows Skippy balancing and hopping
in a vertical plane, and falling over a lot. A shoe in the shape of a
blade is fitted to Skippy's foot, so that Skippy is effectively balancing on a
knife edge and can therefore use a planar balance controller. The
video first shows Skippy balancing, making a small hop in place, recovering its
balance, and making another hop in place. It then shows Skippy making
a two-hop sequence in which the first hop is in place and the second is a
travelling hop. The rest of the video then shows Skippy falling over
again and again. This last part shows how robust Skippy really is: it
has now crashed and fallen many dozens of times without suffering any
damage. Everything that Skippy does in this video is accomplished
using a single actuator.
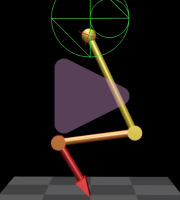
Making a Double Backflip Using a Springy Leg (June 2023)
This animation, prepared by Juan, shows a planar double pendulum with a springy
leg get up off the floor, balance, crouch, launch into a double backflip,
control its motion in flight, land, absorb the energy of landing, and come to
rest in a balanced position—all of it accomplished using only a single
actuated joint. It was the climax of Juan's Ph.D. studies, which
focussed on the problem of balancing and hopping with a springy leg, including
techniques to absorb energy from the spring on landing, and to damp out
vibrations in the spring while balancing. It is a clear advance on
Morteza's original work shown below. For more details on Juan's work
on this topic see publications 21,
23, 27
and 31.
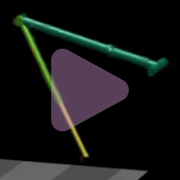
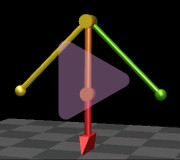
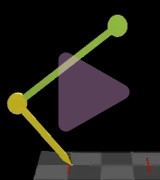
Control of Absolute Motion While Balancing (Dec 2021)
This animation shows a planar triple pendulum balancing on a knife edge while
making its tip follow a trajectory shown in green. The novelty here is
that the robot is controlling the absolute motion of its tip, using an
operational-space motion controller, and using the null space of the motion
task to balance; but both the operational space and the null space involve the
orientation of the bottom link about the knife edge, which is the robot's
passive degree of freedom, so the robot has both an underactuated operational
space and an underactuated null space. This animation is an excerpt
from Roy's presentation at ICAR 2021. To see the complete presentation
click here; and for more details
see publication 26.
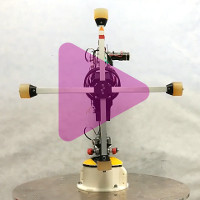
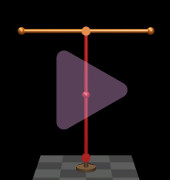
Tippy Balancing in 2D Using the Crossbar (Feb 2018)
This video shows Tippy balancing while simultaneously following a command
signal that specifies the motion of the crossbar. You can see the
command signal in the left part of the video. The balance controller
includes a balance offset observer that measures the difference between true
and estimated balanced configurations so that the controller can improve its
estimate. You can see this happening during the first few seconds, and
again near the end of the video when the robot is being pushed. The
command signal asks Tippy to make some very fast movements, and you can see
that Tippy responds very quickly. You can also see it leaning in
anticipation of the command signal. Finally, the video shows Tippy
resisting and recovering from large external disturbances. For more
details see publication 17.
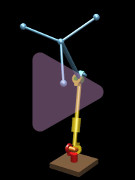
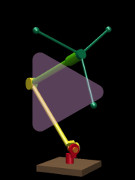
Bend-Swivel Balance Control in 3D(2012, 2016)
left: (2012) SV2,
right: (2016) SV2
These animations show what bend-swivel balance control looks like. In
this strategy, the bend angle is controlled by a 2D balance controller, and the
task of the swivel controller is to keep the bend plane vertical and control
the overall heading of the robot. The animation on the left shows
Morteza's original implementation; and the one on the right is a more recent
implementation by Roy on a Tippy-like robot. Both keep their balance
very well, but neither tracks motion commands accurately while
swivelling. The likely reason is gyroscopic forces. See
publications 6
and 8.
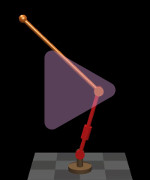
Leaning in Anticipation(2015, 2016)
left: (2015) SV2,
right: (2016) SV2
Leaning in anticipation of future motions greatly improves a robot's ability to
balance. The animation on the left shows Roy's first demonstration of
this behaviour. It was presented in
talk 1, and shows a simple bending and
straightening movement performed twice without leaning in anticipation, and
then twice more with leaning in anticipation. The graph of the
response is here. The one on the
right begins with a sequence of movements performed without leaning in
anticipation, and continues with a similar sequence performed with leaning in
anticipation and higher feedback gains to produce faster, sharper
movements. Gains this high would be impractical without leaning in
anticipation. See publication 14.
Balancing in Combination with Other Motions(2015)
(2015) SV2
This is the animation that Roy showed at Int. Symp. Robotics Research (see
publication 10), and again in
talk 1. It is the first animation to
show the balance controller operating together with a motion
controller. It is also the only animation to show a branched kinematic
tree; and it is the last animation that Roy made before working out how to do
leaning in anticipation. The animation begins with three bending and
straightening motions. In the first, the balance controller operates
the lower joint; in the second it operates the upper two joints; and in the
third it operates all three. In the remainder of the animation, the
balance controller operates only the lower joint.
Morteza's Great Leaps Forward (2012)
The animation on the left shows Morteza's balance controller performing single
hops beginning and ending in a balanced upright configuration. The
robot is based on the Acrobot, as
defined here.
The sequence of actions is more complicated than it appears. First,
the robot must maintain its balance in the initial position. Then it
must crouch down and lean forward (deliberately losing its balance), and then
push with the right speed and timing in order to reach the right lift-off
momentum (linear and angular) as the foot leaves the ground. Then it
has to control its foot trajectory during flight in order to land on the right
spot. Finally, it has to recover its balance after landing, and return
to an upright configuration. And all of this is done using just one
actuator. See publications 4
and 6. The animation on the right,
which Morteza never published, shows the same movement, using the same control
system, but on a robot with a springy leg. The control system does not
know that the spring is there (it thinks the leg is rigid); and yet it still
works despite the large disturbances caused by the spring. Although
never published, this was a pioneering result.