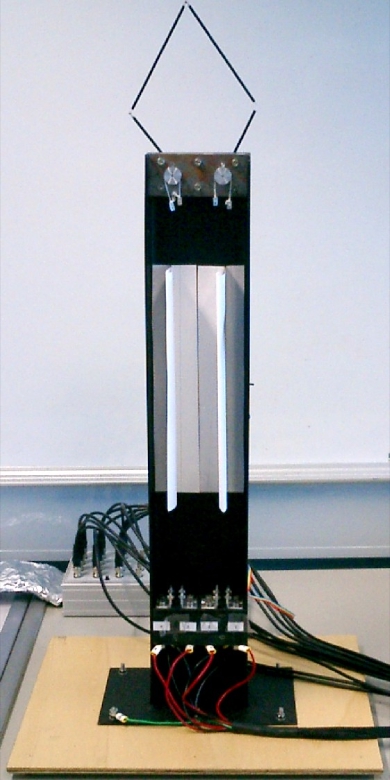
This is the robot that Yee Harn built for his B.Sc. honours project in 2003. The photo aboveat left shows the complete robot, and the two close-ups below show some of the details. Its main features are:
- two antagonistic pairs of 0.1mm SMA (Flexinol®) wires, each pair operating a drive shaft via a pulley;
- a lightweight pantograph mechanism made from carbon tubes, which serves as a coupled, nonlinear dynamic load for the two actuators to control;
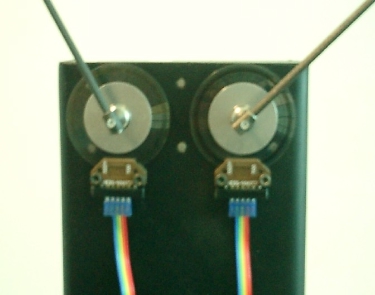
- high-resolution optical shaft encoders to measure drive-shaft rotation;
- a DS1104 real-time control board from dSpace; and
- power amplifiers to deliver heating currents to the wires.
The paper separators in the column prevent the wires from touching each other, which would cause an electrical short circuit; and the photo below shows how the wires operate the pulleys. Each wire is about 90cm long, and is folded in half so that the two ends are anchored at the bottom of the column and the middle passes through an eyelet at the end of a short chord attached to a pulley.
We used this robot to test a new rapid-heating algorithm that doubles the operating speed of the actuators. Here is a movie showing the robot tracing a small square at speeds up to 1Hz (four corners per second). The speed is excellent, but the accuracy is not so good.